Comment l’IA va changer notre façon de nous déplacer
Rapport à la voiture, standards de sécurité, infrastructures… L’avènement du véhicule autonome ne va pas seulement transformer nos modes de transport, il va aussi modifier en profondeur notre société. Pour anticiper cette mutation de la mobilité, des chercheurs et des industriels lyonnais ont créé Transpolis, une ville laboratoire unique en Europe. Un exemple d’une approche pluridisciplinaire réussie.
Le défi de la voiture autonome
Le véhicule autonome est certainement le domaine d’application le plus spectaculaire de l’intelligence artificielle (IA). Il fait l’objet d’investissements colossaux de la part des constructeurs automobiles, des équipementiers, mais aussi des géants du numériques (GAFA) et de nouveaux entrants comme Tesla (véhicules électriques) ou Uber (VTC). L’enjeu est énorme. Sachant que le logiciel représentera bientôt plus de la moitié des coûts de développement d’un véhicule, une nouvelle donne est possible. La compétition internationale fait donc rage entre industriels de l’automobile et start-ups. Dans le livre blanc qu’il vient de publier sur le sujet, l’Institut national de recherche en informatique et en automatique (Inria) souligne pourtant qu’à ce jour aucun acteur ne maîtrise toutes les composantes du dossier, qu’elles soient scientifiques, technologiques, industrielles ou économiques. L’heure est donc aussi aux alliances industrielles et à la coopération.
Cette coopération passe par la création de pôles de recherche et développement rassemblant chercheurs, industriels et territoires. C’est ainsi qu’est né Transpolis, plateforme d’expérimentation de 80ha située aux portes de Lyon (lire l’encadré). Elle va permettre de tester des solutions de mobilité innovantes, dont bien sûr la voiture autonome, dans un environnement urbain à l’échelle réelle.
➠ Plus loin dans le Mag : Transpolis, un laboratoire de la mobilité urbaine
En France, une approche progressive basée sur la sécurité
Après avoir manqué plusieurs coches technologiques, la France entend bien être cette fois à la pointe de la révolution introduite par la voiture autonome. Elle vient pour cela de se doter d’une stratégie nationale volontariste, fruit d’une mission d’étude menée par l’ancienne ministre Anne-Marie Idrac. L’enjeu est de définir un « cadre sécurisé » permettant aux différents acteurs de mener plus facilement leurs expérimentations. Cela va se traduire par une évolution du cadre législatif et réglementaire, mais aussi par l’intégration de sujets comme la cybersécurité, le traitement des données, la cartographie ou la connexion avec les infrastructures…
Contrairement à la Chine ou aux États-Unis, la France a fait le choix d’une approche progressive, basée sur la sécurité. Pour Anne-Marie Idrac, l’acceptabilité du véhicule autonome est fondamentale pour que la technologie se développe. Cela suppose de prendre en compte la sécurité, mais aussi l’adéquation aux usages, les impacts sur les mobilités et les conséquences en matière d’emploi et d’environnement.
Le calendrier de développement de la voiture autonome en France
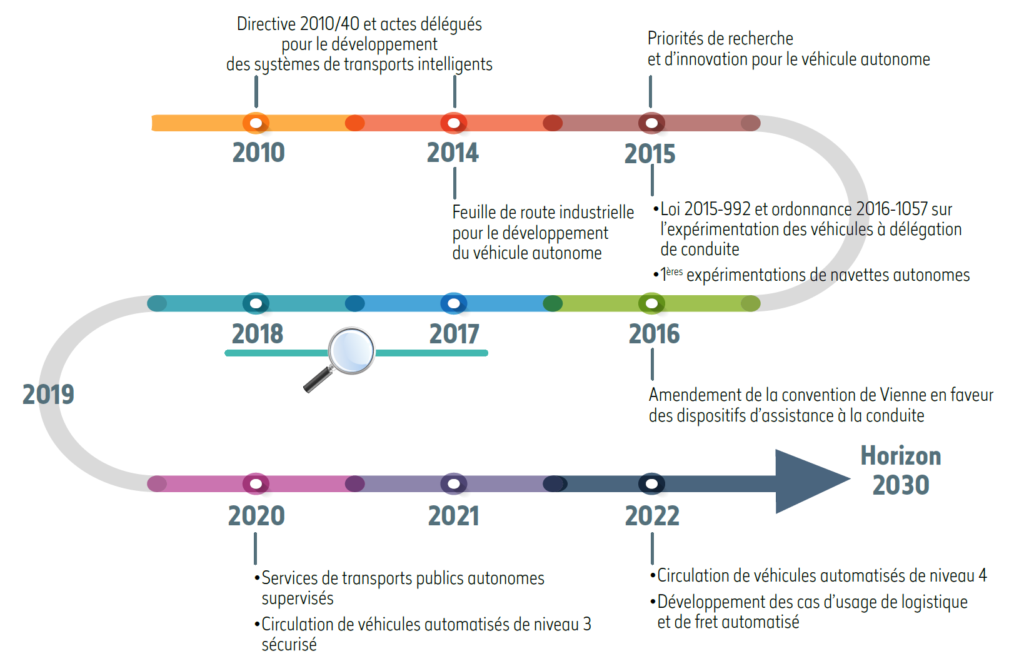
L’un des objectifs inscrits dans le rapport est de permettre, d’ici à 2020-2022, la circulation de véhicules individuels autonomes de niveau 3 et de niveau 4 (lire l’encadré). Le calendrier est serré, mais il semble en ligne avec celui des constructeurs français (PSA, Renault-Nissan). Dans son livre blanc, l’Inria pointe toutefois les nombreux défis technologiques et scientifiques qui restent à relever : ceux liés à la navigation autonome en elle-même, ceux qui concernent la sûreté de fonctionnement et ceux qui touchent à l’intégration des véhicules autonomes dans leur environnement. Il n’oublie pas de mentionner l’impact sociétal, légal et éthique de la voiture autonome.
Transpolis, un laboratoire de la mobilité urbaine
Dans la plaine de l’Ain, à une quarantaine de kilomètres de Lyon, les engins de chantiers s’affairent : une nouvelle étape commence avec la mise en place des revêtements bitumeux des pistes d’essai.
On a encore du mal à imaginer qu’une ville laboratoire s’élèvera bientôt sur cet ancien terrain militaire de 80 ha.

Vue aérienne du site de Transpolis en travaux – @Transpolis
Tronçon d’autoroute, route de campagne sinueuse raccordée à un mini-périphérique urbain, parkings, ronds-points, carrefours régulés par des feux… Toutes ces infrastructures permettront de tester des véhicules autonomes en conditions réelles. Développée conjointement par l’IFSTTAR et la société Transpolis, cette plateforme d’essai unique en Europe réunit des industriels, des PME et des start-ups. Sa particularité est de ne pas limiter son champ d’action au seul véhicule autonome, mais de s’intéresser à toutes les problématiques de mobilité urbaine. Des études sont d’ores et déjà programmées sur la gestion du trafic, le suivi des marchandises en ville, les stations de recharge multi-énergie, l’Internet des objets ou l’accessibilité.
Comment s’y prend-on pour rendre un véhicule autonome ?
Il y aura d’abord une phase de simulation. Il s’agit de recréer, de manière virtuelle, un environnement physiquement paramétrable de façon à mettre le système en situation critique. Cela permet de multiplier le nombre de scénarios critiques. Reste ensuite à évaluer le niveau de robustesse de la simulation en la confrontant aux « vérités de terrain ». C’est ce que permet la ville laboratoire de Transpolis.
Pourquoi faut-il un laboratoire de la taille d’une ville pour tester des voitures autonomes ?
Pour une raison évidente : le transport ne se résume pas aux véhicules. Si l’on veut imaginer la mobilité de demain, il faut avoir une approche systémique des déplacements. On doit prendre en compte des usagers, un territoire, des infrastructures et des aménagements, des véhicules, des technologies de communication et d’énergie. C’est pour cela que nous reconstituons un environnement urbain à l’échelle réelle. Pour maîtriser toutes ces dimensions, il est nécessaire de faire collaborer différentes communautés : des chercheurs, qui proposent des solutions et les évaluent ; des industriels, qui vont se saisir des technologies pour répondre aux attentes du marché ; des territoires, enfin, en tant que responsables de la mobilité et de la sécurité de tous les usagers.
➠ Sur le portail Pop’Sciences : Regards croisés sur le véhicule autonome
Le développement des véhicules autonomes va-t-il nous obliger à revoir toutes nos infrastructures ?
Les visions divergent à ce sujet. Les constructeurs pensent que oui mais qu’il faudra du temps pour y parvenir. Mon expérience, et en particulier le dialogue que j’entretiens avec les experts des infrastructures, me laissent penser qu’une importante partie de celles-ci sont déployées ou en cours de déploiement. Pour moi, le frein principal vient plutôt de la gestion des données et des enjeux de cybersécurité. Ce n’est le point fort ni des spécialistes de l’automobile ni des spécialistes des infrastructures. Les uns et les autres se demandent s’ils doivent se lancer dans cette bataille au risque de perdre leur valeur ajoutée. Notre rôle est justement de jouer un rôle d’interface pour les aider à faire les bons choix.
Véhicules autonomes. « Il faut œuvrer à une meilleure coopération homme-machine »
À la lumière du premier accident mortel impliquant un véhicule autonome aux États-Unis, Catherine Gabaude, spécialiste en psychologie cognitive et chargée de recherche à l’Institut français des sciences et technologies des transports, de l’aménagement et des réseaux (IFSTTAR), évoque les enjeux liés à la sécurité et à la responsabilité dans le déploiement de cette technologie.
Le premier accident mortel impliquant un véhicule autonome est survenu en mars dernier. Est-ce le symptôme d’une mauvaise maîtrise de nos innovations technologiques ?
C’est une question extrêmement délicate. Je dirais qu’il s’agit avant tout du symptôme d’une course trop rapide à l’innovation. Plus précisément, il s’agit de la convergence de deux facteurs prééminents : d’un côté des essais qui ne sont pas toujours assez bien encadrés ; de l’autre, l’avènement d’une technologie qui est encore perfectible. La pression industrielle et technique est forte, pour autant le déploiement de moyens de transports autonomes nécessite de la prudence, en particulier dans les tests sur des routes ouvertes.
Dans le cas précis de cet accident, on jauge le degré démesuré de confiance que l’humain peutaccorder à cette technologie encore naissante. Le conducteur n’était pas à sa tâche de supervision du véhicule, et il aurait fallu concevoir une interface davantage basée sur la complémentarité entre l’humain et la machine et œuvrer à une meilleur coopération.
Radar, sonar, autoguidage, guidage GPS… Les algorithmes sur des véhicules autonomes fonctionnent avec des techniques de classification pour essayer d’identifier la nature de l’obstacle et la réaction à adopter face à elle. Dans le cas de l’accident mettant en cause un véhicule déployé par Uber, un des systèmes de réaction (freinage d’urgence) avait été désactivé « afin de réduire de potentiels comportements erratiques du véhicule » (source : Conseil national de la sécurité des transports américain – NTSB).
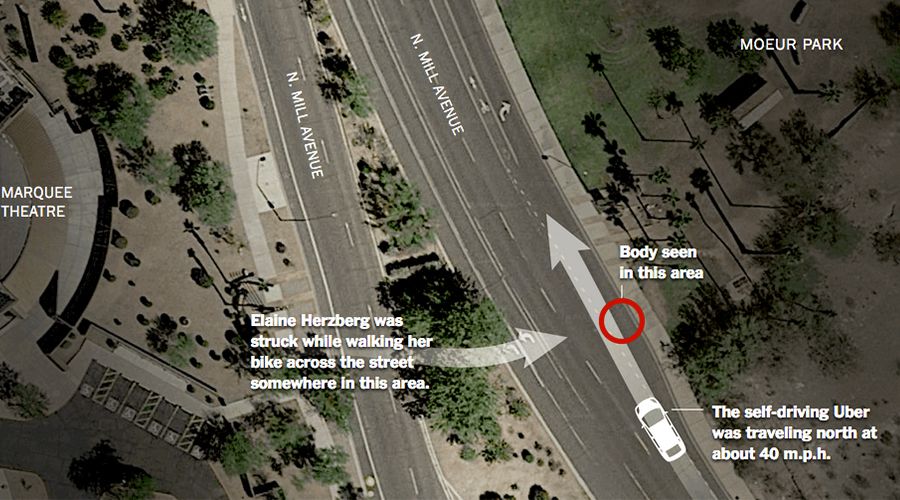
Schéma de l’accident impliquant un véhicule autonome Uber en Arizona – mars 2018. @New York Times
Si, six secondes avant la collision, le conducteur avait été informé, il aurait été en théorie à même d’intervenir et de reprendre le contrôle mais ici le système ne l’a pas averti du danger.
Qu’en est-il de la responsabilité dans ce type d’accident ?
Cette question est essentielle au vu du nombre important d’acteurs concernés par la conception et la mise en œuvre d’un véhicule autonome. Le partage des responsabilités entre ingénieurs, développeurs, concepteurs, chefs d’entreprises et conducteurs, n’est pour le moment pas résolu.
Au vu de la complexité de la nature et nos environnements, partons du principe que nous n’arriverons pas à faire anticiper à une machine 100% des cas de figure d’accidents. Il y aura à ce titre des événements malheureux qui se produiront. Pour s’y préparer, des juristes envisagent une imputation de la responsabilité « en cascade ». Toutes les données de conduite étant enregistrées (sans pour autant contrevenir aux limites de la protection des informations personnelles), il s’agira en cas de litige de définir un degré de responsabilité pour chaque niveau de la chaîne de déploiement du véhicule : du développeur d’algorithmes jusqu’au conducteur, en passant par le constructeur ou même le loueur.
Pour autant, je pense que la question de la responsabilité n’est pas un frein au développement des véhicules intelligents et autonomes, mais un paramètre à intégrer dans la réflexion.
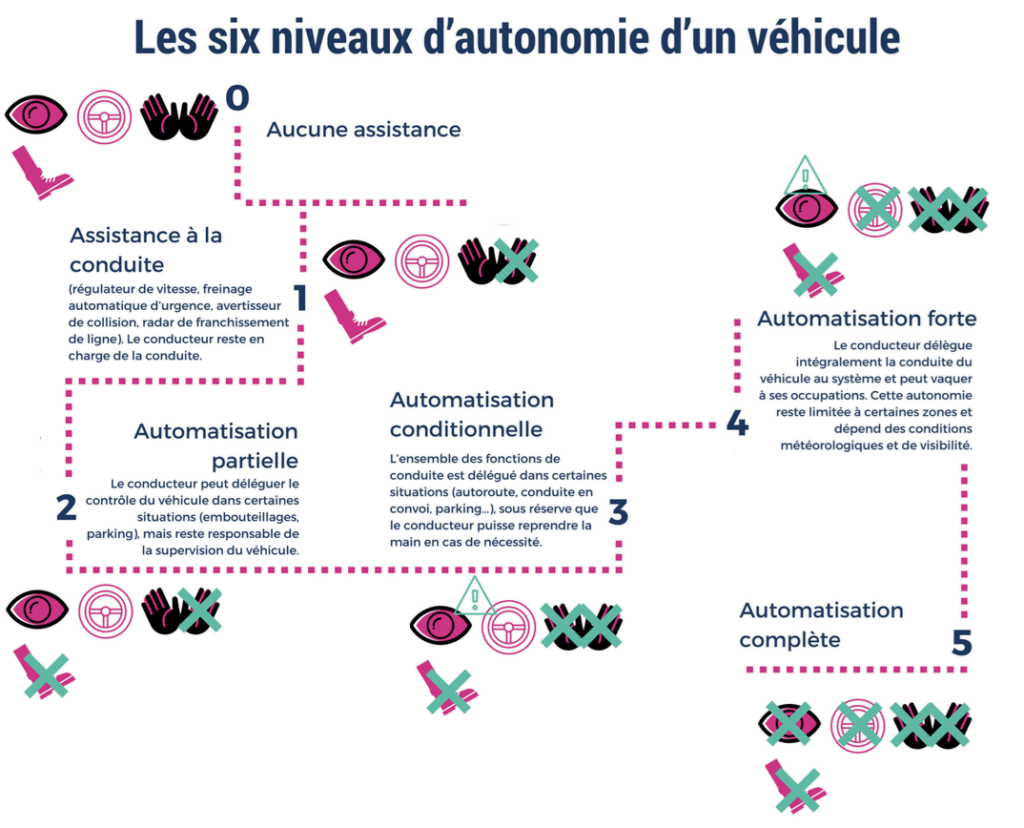
Vous semble-t-il envisageable d’arriver à une complète autonomie des véhicules ?
L’autonomie complète n’est selon moi pas encore imaginable en dehors d’un cadre maîtrisé. Nous avons déjà aujourd’hui des navettes en autonomie (Navya dans le quartier Confluence à Lyon). Elles sont très limitées notamment en termes de vitesse afin de réduire le potentiel de dégâts en cas d’accident. Nous sommes également à même d’ajouter de nouvelles briques technologiques aux véhicules, comme l’assistance à la conduite en embouteillage par exemple. Ensuite à moyen terme, je suppose que nous montrons en puissance dans des milieux maitrisés (ou sites protégés) en créant notamment des « trains de véhicules » sur les autoroutes. C’est à dire qu’une voiture pilote pourra entraîner dans son sillage toute une série d’autres véhicules en autonomie.
Le déploiement se fera progressivement, au même rythme que l’acceptation et l’appropriation des outils par les usagers.

Vue détaillée, véhicule autonome de l’IFSTTAR | @Visée.A
À propos d’acception, quels sont les leviers éthiques et sociétaux à activer pour le développement des IA sur nos routes ?
Doter l’Homme de machines pour accroître son potentiel d’intelligence est selon moi important à concevoir là où il y a des défaillances ; et c’est particulièrement le cas pour la mobilité. 90% des accidents sont aujourd’hui imputés à une erreur humaine.Les capteurs technologiques développés ont désormais le potentiel de compenser la « faiblesse » de nos « capteurs humains ». Les gains sont non négligeables en termes de santé publique et de sécurité routière.
Décrivez-nous votre ville intelligente idéale ?
Dans ma ville idéale, toute la logistique urbaine sera simplifiée et optimisée pour dépenser moins d’énergie ou pour sécuriser mes déplacements. Le covoiturage intelligent ira jusqu’à « remplir » tous les véhicules non seulement de passagers, mais également d’objets. Les livraisons pourront ainsi être optimisées, le nombre de véhicules réduits et les coûts induits bien moins importants pour toute la société. De cette même manière, la multi-modalité deviendra intelligente avec des systèmes facilitant le cumul des modes de transports pour nos déplacements (marche, vélo, transports en communs, véhicules personnels, fer, etc.). Les bénéfices énergétiques, écologiques et financiers sont trop importants pour ne pas aller dans ce sens.
La qualité de vie des usagers est un préalable nécessaire à tout projet d’innovation à l’échelle urbaine. Imaginons que dans cette ville idéale nous n’ayons plus de parking ou de garages du fait que des flottes de véhicules partagés soient en mouvement permanent et facilement accessibles. La ville idéale, grâce à l’IA, proposera un environnement où les accidents de la circulation auront disparu, où les flux de mobilité seront optimisés (nous faisant gagner du temps utile) et où nos déplacements ne nuiront plus au bien-être des autres usagers (pollution sonore, atmosphérique, etc.).
Soyons capables de savoir à quoi nous aspirons et à quoi nous rêvons pour nos sociétés. Faisons nos choix de mobilité et de vie en fonction de ça et nous réussirons à mieux vivre la ville de demain.